Kia Forte: Ограничения системы / Распознавание автомобиля
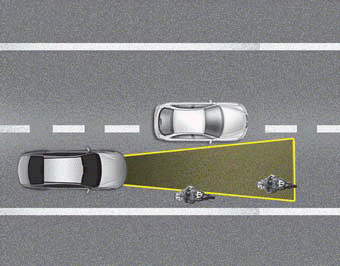
Некоторые из следующих транспортных средств впереди на вашей полосе могут быть не распознаны по датчику:
- Узкие транспортные средства, такие как мотоциклы
или велосипеды
- Транспортные средства смещены в одну сторону
- Медленно движущиеся транспортные средства или внезапно
замедляющие транспортные средства
- Остановленные транспортные средства
- Автомобили с небольшим задним профилем
например, прицепы без груза
Идущий впереди автомобиль может быть не распознан правильно датчиком, когда происходит любое из следующего:
- Когда автомобиль направлен
вверх из-за перегрузки в
багажник (задняя дверь)
- Во время поворотов
- При движении по одной стороне полосы
- При движении по узким полосам или по
кривые
Отрегулируйте скорость вашего автомобиля, нажатие педали тормоза в соответствии к дороге и дорожным условиям предстоящий.
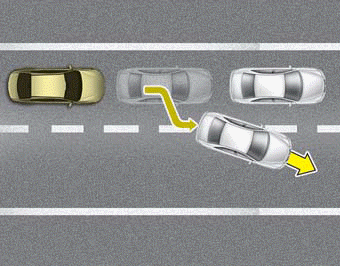
• Когда транспортное средство стоит и автомобиль перед вами перестраивайтесь на следующую полосу, будьте осторожны когда ваш автомобиль начинает двигаться, потому что это может не сразу распознать остановившийся автомобиль перед тобой.
В этой ситуации вы должны поддерживать безопасный тормозной путь и, при необходимости, нажмите педаль тормоза, чтобы снизить скорость движения, чтобы соблюдать безопасную дистанцию.
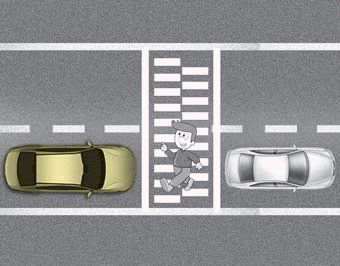
• Всегда следите за пешеходами когда ваш автомобиль поддерживает расстояние с впереди идущим автомобилем.
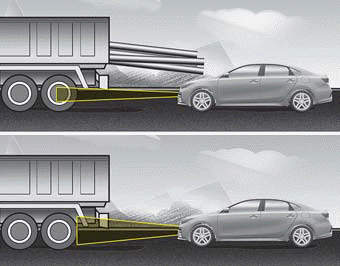
• Всегда будьте осторожны, когда приближающиеся транспортные средства, которые выше с более высоким клиренсом, или автомобили несущие грузы, которые торчат из задняя часть автомобиля.
ВНИМАНИЕ! Наклоны и буксировка
Не используйте умный круиз система управления на крутом наклонах или при буксировке другого транспортного средства или прицепа, поскольку такие чрезмерная нагрузка может помешать со способностью вашего автомобиля поддерживать выбранную скорость.
ПРЕДУПРЕЖДЕНИЕ
При использовании Smart Cruise Контроль, примите следующие меры предосторожности:
- Если необходима аварийная остановка, вы должны применить тормоза. Умный круиз-контроль система может быть не в состоянии полностью остановить автомобиль или избежать столкновения в любой ситуации.
- Держитесь на безопасном расстоянии в соответствии к дорожным условиям и скорость автомобиля. Если транспортное средство до расстояние до автомобиля слишком мало во время движения на высокой скорости, может произойти серьезное столкновение.
- Всегда поддерживайте достаточно тормозной путь и замедление свой автомобиль, подав заявку тормоза при необходимости.
- Система умного круиз-контроля может не распознать остановившийся автомобиль, пешеходы или встречного автомобиля. Всегда смотрите вперед осторожно чтобы реагировать на неожиданные и внезапные ситуации.
- Транспортные средства, движущиеся впереди вы делаете частый переулок изменения могут привести к задержке реакция системы или может заставить систему реагировать на транспортное средство фактически находится в соседнем переулок. Всегда ведите машину осторожно в чтобы реагировать на неожиданные и внезапные ситуации.
- Всегда быть в курсе выбранного скорость и транспортное средство к транспортному средству расстояние. Водитель не следует полагаться только на система, но всегда обращайте внимание к условиям вождения и контролировать скорость автомобиля.
- Система умного круиз-контроля может не распознать сложный дорожные ситуации, поэтому всегда обращайте внимание на вождение условия и контроль скорость вашего автомобиля.
- Для безопасной работы тщательно прочитайте и следуйте инструкциям в этом руководстве перед использовать.
ОСТОРОЖНОСТЬ
Умная система круиз-контроля может временно не работать из-за электрических помех.
✽ УВЕДОМЛЕНИЕ
Умная система круиз-контроля может работать неправильно из-за:
- Электрические помехи.
- Модификация подвески.
- Различия истирания шин или шин давление.
- Установка разного типа шин.
 На склонах, смена полосы движения
На склонах, смена полосы движения
На склонах
Во время движения в гору или на спуске
умная система круиз-контроля
может не сразу обнаружить движущееся
автомобиль на вашей полосе и может
заставить ваш автомобиль разогнаться до
...
 Интегрированная система управления режимом движения
Интегрированная система управления режимом движения
Режим движения можно выбрать
по желанию водителя
или состояние дороги.
Режим меняется всякий раз, когда
Нажата кнопка DRIVE MODE.
УМНЫЙ режим : УМНЫЙ режим
автоматически...
Дополнительная информация:
Kia Forte 2019-2023 (BD) Руководство по ремонту: Трансмиссионное масло
Процедуры ремонта осмотр Проверка уровня масла 1. Снимите нижнюю крышку. (См. Механическая система двигателя — «Машинное отделение под крышкой») 2. Снимите пробку маслоналивного отверстия (А). 3. Проверить состояние тр...
Kia Forte 2019-2023 (BD) Руководство по ремонту: Цепь ГРМ
Компоненты и расположение компонентов Компоненты 1. Временная цепь 2. Направляющая цепи ГРМ 3. Рычаг цепи ГРМ 4. Автоматический натяжитель цепи ГРМ. Процедуры ремонта Удаление 1. Провернуть коленчатый вал...